

數(shù)控機床上下料
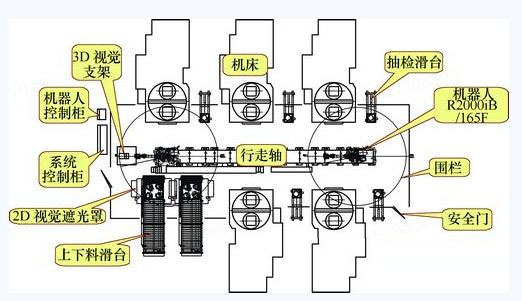
該系統(tǒng)使用1臺機器人完成服務(wù)5臺機床進行上下料的作業(yè),系統(tǒng)描述如下:
(1)1臺FANUC R-2000iB /165F機器人:安裝于行走軸上,實現(xiàn)整個系統(tǒng)的上下料動作。
(2)1個機器人手爪:基于機器人專用手爪單元開發(fā)的手爪,非常適用于工件一致性不好的使用情況,并有較高的定位精度和抓持穩(wěn)定性、定位精度高、耐用性好及維護簡單的優(yōu)點。
(3)1個長11m的行走軸:在行走軸導(dǎo)軌上安裝一臺工業(yè)機器人,最大運動速度為1.5m/s,使用FANUC伺服電動機驅(qū)動,具有重復(fù)定位精度高、響應(yīng)速度快、運行平穩(wěn)及可靠等特點,并專門設(shè)計了防塵罩,保護導(dǎo)軌、直線軸承以及齒條等運動部件,大大提高了可靠性和使用壽命。在實際應(yīng)用中,導(dǎo)軌安裝于兩條生產(chǎn)線機床的中心線上,所安裝的工業(yè)機器人運動范圍完全覆蓋5臺機床以及上下料滑臺區(qū)域。從而實現(xiàn)了1臺機器人服務(wù)5臺機床進行上下料作業(yè)。

(4)2臺上下料滑臺:每個上下料滑臺上有4個托盤,每個托盤分別可以存放一個工件。實現(xiàn)待加工工件的上料,以及加工完成工件的下料。在該系統(tǒng)中,由于使用了視覺技術(shù),因此上下料滑臺無需工件的定位裝置。
(5)2DV視覺系統(tǒng):該視覺系統(tǒng)由一個安裝于手爪上的2D攝像頭完成視覺數(shù)據(jù)采集。該視覺系統(tǒng)作為待加工工件準確抓取的定位方式,省去通常為滿足機器人的準確抓取而必須采用的機械預(yù)定位夾具,具有很高的柔性,使得在加工中心上可以非常容易地實現(xiàn)多產(chǎn)品混合生產(chǎn)。
(6)3DL視覺系統(tǒng):該視覺系統(tǒng)由一個安裝于地面上的3D Laser Sensor完成視覺數(shù)據(jù)采集。該視覺系統(tǒng)解決了定位面有偏差的工件上料位置變化問題。由于待加工工件為毛坯件,機器人抓取工件后,上料的定位孔位置會發(fā)生變化,甚至工件上料時的平面度也有變化。該技術(shù)可以自動補償位置變化,實現(xiàn)高精度上料。
(7)5臺抽檢滑臺:針對每臺機床有一個抽檢滑臺,實現(xiàn)隨時對該機床工件加工工件質(zhì)量的檢測。
(8)電氣控制系統(tǒng):運用人機界面對整個系統(tǒng)的運行狀態(tài)進行監(jiān)控,采用控制器并使用工業(yè)現(xiàn)場總線實現(xiàn)系統(tǒng)中實時和非實時數(shù)據(jù)的傳輸,具有高度可靠性和可維護性。安全設(shè)備采用門開關(guān),作為機器人工作區(qū)域的安全防護,完全做到人機隔離,確保系統(tǒng)在自動運行中的人員安全。
頁面版權(quán)所有山東紅寶自動化有限公司 網(wǎng)站地圖XML 主營產(chǎn)品:非標自動化,自動化包裝生產(chǎn)線,機器人應(yīng)用,agv搬運機器人 SEO